 |
|
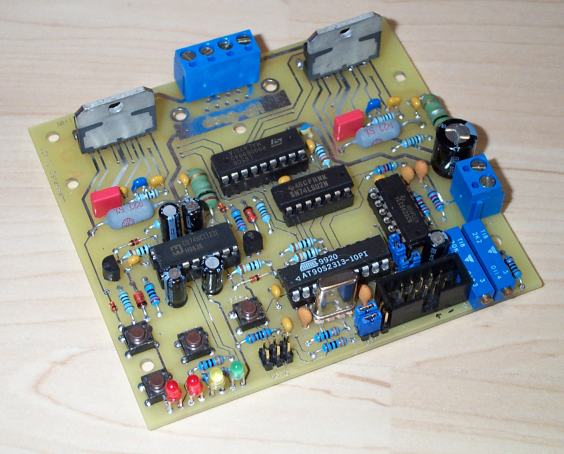
Dieses Projekt habe ich schon vor über 2 Jahren angefangen. Nach dem ich mit der 3-Kanal Schrittmotorkarte im Großen und Ganzen zufrieden war, wollte ich auch mal etwas größeres machen. Obwohl das für meine Schrittmotoren eigentlich nicht nötig gewesen währe... Wie so oft kamen wichtigere Dinge dazwischen, so daß der erste Prototyp in der Schublade verschwand. Mit dem aufkommenden Erfolg der 3-Achs Karte kamen auch von anderen Nutzern Anfragen nach einer leistungsfähigeren Elektronik, wobei die unterschiedlichsten Wünsche zusammenkamen. Also habe ich die Arbeit an der Schaltung wieder aufgenommen. Nach mehreren Unterbrechungen durch andere Projekte und berufliches habe ich im Herbst 2001 etwas mehr Tempo gegeben, um die Sache schnellstmöglich zum Abschluß zu bringen. Es hat sich dann doch noch etwas länger hingezogen als erwartet, aber jetzt ist die Karte endlich fertig.
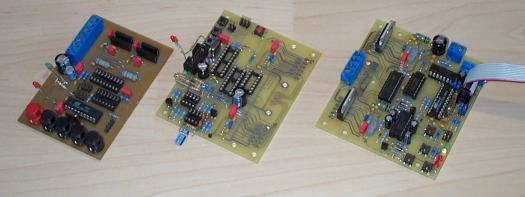
Der erste Prototyp enstand schon im Dezember 1999(!) auf einer selbstgefrästen Platine. Von Anfang an waren einige Taster vorgesehen, um die Karte evtl. auch unabhängig vom PC betreiben zu können. Da für Mikroschritt wechselnde (analoge) Referenzspannungen für den Stromregler erforderlich sind, muß der Controller die Möglichkeit haben, Analogwerte auszugeben. Dies sollte zunächst durch zwei PWM-Kanäle erfolgen, die über ein einfaches RC-Glied geglättet werden sollten.
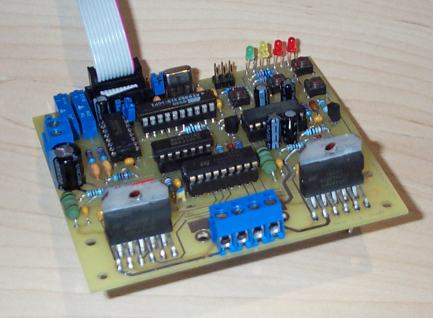
Im Mai 2001 ging die Arbeit endlich weiter. Der erste Protoyp hatte einige Probleme, die es zu beheben galt. Der zunächst verwendete AVR-Controller 90S1200 verfügt weder über einen echten Stack, noch über RAM oder die Möglichkeit, Variablen aus dem Flash-ROM zu laden. Daher wurde er durch seinen großen Bruder 90S2313 ersetzt. Vor allem die Glättung der beiden PWM-Signale machte Probleme. Daher wurden dem 2. Prototypen aktive Tiefpaßfilter 2. Ordnung spendiert. Auch das Layout für die Endstufen-ICs L6203 war noch fehlerhaft.
Nachdem auch die tiefpaßgefilterten PWM-Signale letztlich nicht
schnell und präzise genug waren, mußte doch ein D/A-Wandler her. Um
keinen größeren Prozessor nehmen zu müssen, kam nur ein Typ mit
seriellem Interface in Frage. Das SPI-Interface ist deutlich schneller
als I2C, wenn die Schnittstelle nur in Software realisiert wird. Die
Wahl fiel letztlich auf den TLC5620 von TI, der sogar 4*8 Bit bietet.
Da die Endstufen nicht gerade billig sind und - im Gegensatz zu den
L298 - auch nicht gesockelt werden können, wurde die Schaltung
zusätzlich um einen Kurzschlußschutz erweitert. Dadurch passen die
Bauteile allerdings nicht mehr auf eine halbe Eurokarte (100*80mm) -
die endgütige Version der Schaltung ist 100*100mm groß. SMD-Bauteile
wollte ich möglichst nicht verwenden, damit die Schaltung leicht
nachzubauen ist.
Die Platine und alle Bauteile können wie üblich über mechapro bestellt werden.